Technology Information

IMU Integration with VBOX 3i
IMUによる補正

|
|
GPSは空が広く開けた場所で使用すれば、非常に高い速度精度を提供します。
しかし、橋の下や樹木の傍、ビルの多い市街地では衛星信号のクオリティーが劣化し、ノイズを引き起こしてしまいます。
このような環境においてもGPSの精度を維持するために、新たにIMU(3軸加速度計/3軸ジャイロ) による補正機能をVBOX3i 100Hz Data
Logger システムに導入しました。
GPSデータにIMUデータを加えて処理することにより、VBOX3i はGPSが受信しづらい環境においても、よりスムーズで信頼のあるデータを提供します。 また、この補正機能により、VBOX3i
は信号のドロップアウトを高い精度で数秒間防ぐことが可能となっています。
|
|
このVBOX3i システムは、従来のVBOX3 システムと比較すると、高い精度を維持した状態でよりスムーズなデータを測定していることが確認できます。
これにより、今まで以上に効果的なデータ解析を行うことが可能になります。
|
 |
|
[特徴]
- リアルタイム-カルマンフィルターを使用することで、GPSデータとIMUデータを継ぎ目なく補正を行っています。
- 過渡応答試験において、GPSよりも正確でノイズの少ない速度測定を行います。 また速度のプロファイルが通常のGPSセンサーよりも正確になります。
- GPSがドロップアウトを起こしても、数秒間高い精度で測定を継続できます。 橋のあるテストコースなどで効果的です。
- 従来のVBOX3 システムと比較すると、VBOX3i + IMUは高い精度を維持した状態でよりスムーズなデータを測定しています。 これにより、今まで以上に効果的なデータ解析を行うことが可能になります。
- GPSセンサーとIMUを別々のモジュールにしたことで、フレキシブルに車両への取り付けができます。
- コンパクト化・取り付けを簡単にしたことで、センサーセットアップの時間を大幅に削減できます。
|
GPSデータとIMU補正データの比較
|
|
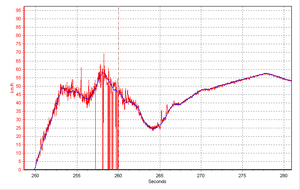
[速 度]
右のグラフは深い森の中を走行した際の速度データです。 GPSデータ(赤のライン)はノイズが多く、また258秒付近で多数のドロップアウトが確認できます。
それに対してVBOX3i+IMUのデータ(青のライン)は、ノイズが減少し、さらにドロップアウトも無くなっています。
|
|
|
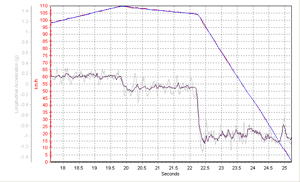
[方 位]
方位はIMU補正により、非常に安定します。(青のライン) 特に、速度が低い範囲(赤のラインの速度を参照)では、計測の原理上、GPS信号だけでは不安定になってしまいます。
|
|
|
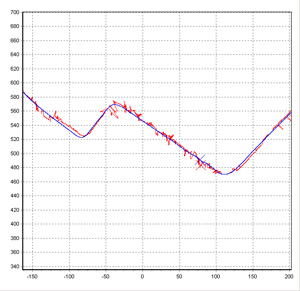
[位 置]
右の走行軌跡はこのページの一番上の写真のような森の中を走行した際のデータです。 GPSのデータ(赤のライン)は衛星を見失ったり、マルチパス信号を受信しているため、ノイズが多く、ドロップアウトも発生しています。
それに比べ、IMU補正(青のライン)は、スムーズでより正確な軌跡を計測していると考えられます。
|
|
|
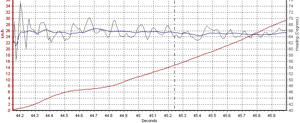
[加速度]
右のグラフは、ABSが介入したブレーキ試験の前後加速度のデータを示しています。
GPSが測定したデータ(灰色のライン)では、いくらかのノイズが見られます。 それに対してIMU補正を行ったデータ(濃い色のライン)は、より正確でノイズが少なくなっていることがわかます。 ブレーキ試験でも非常に有効な計測機器です。
|
|
|
 |



