RTK-GPS測位 : 位置精度2cm

RTK測位(Real Time Kinematic GPS :干渉測位方式) は2台の受信機(1つは固定基準局、もう一つは移動局)を使用して位置測定の精度を飛躍的に向上させる測位方法です。 これによりVBOX4
ADASシステムは2cm CEPの位置精度を提供します。 [RTK測位の詳細な説明はこちらをご確認ください]

 
位置精度を2cmにすることで、車両運動性試験では正確な走行軌跡を取得したり、自動運転試験では交差点での車両位置の把握が可能になります。
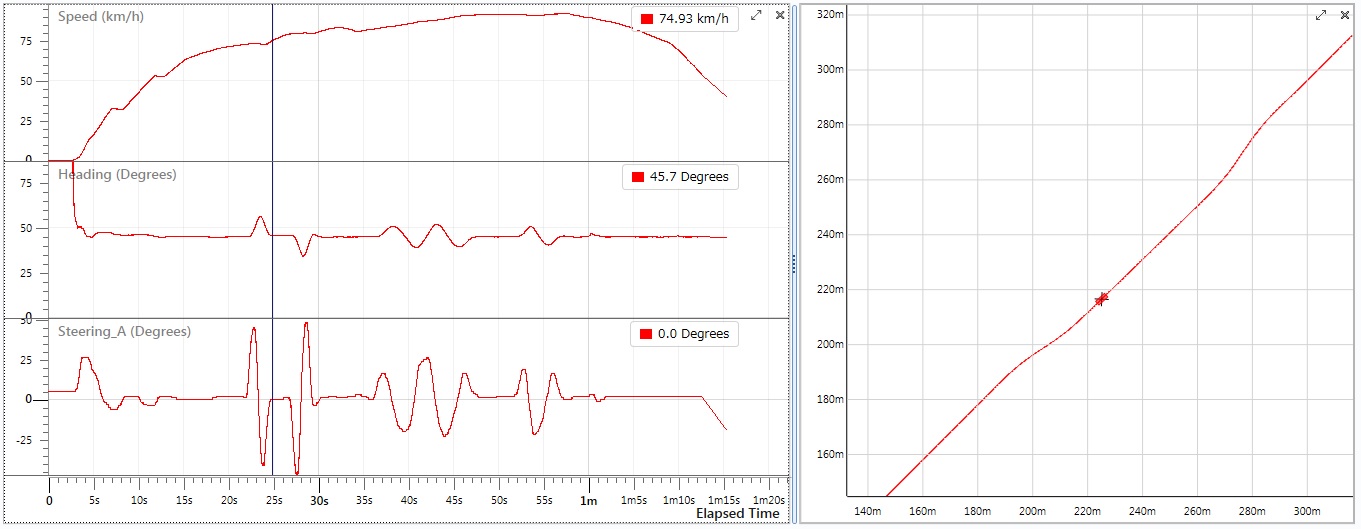
<運動性能試験:レーンチェンジの例>
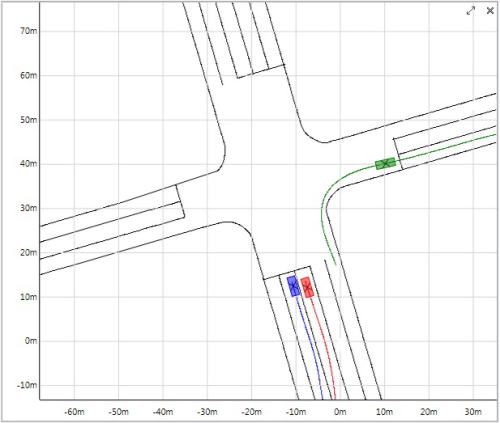
<自動運転試験:交差点での3台の車両の動き>
RTK測位を行うためには、車両のGPS受信機に対して、補正情報を入力する必要があります。
補正情報には、固定基地局を使う方法と電子基準点を使う方法の2種類があります。
電子基準点は、携帯電話通信を利用して補正情報を取得し、市街地などのより広域で2cm 精度を達成する方式です。
固定基地局方式のメリット/デメリットには、以下の特徴があります。
<機器構成>
VBOX4 ADAS 100Hzデータロガー もしくは VBOX4 Dynamics100Hzデータロガー
固定基地局 (ベースステーション RLVBBS6)
無線機 (2.4GHz 特定小電力無線機) x 2台
<メリット>
ランニングコストが発生しない。
テストエリアの近くで補正電波を作成できるので、測位が安定する。
テストコース内で行う車間距離計測や軌跡計測に最適。
<デメリット>
使用できるエリアが、半径1.2kmに限定される。
市街地での試験には不向き。
電子基準点方式のメリット/デメリットには、以下の特徴があります。
<機器構成>
VBOX4 ADAS 100Hzデータロガー もしくは VBOX4 Dynamics100Hzデータロガー
Racelogic NTRIPモデム
NTRIPサービス利用契約
SIMカード
<メリット>
高速道路等の開けたエリアで、市街地テストが可能。
絶対緯度経度の情報が取得できる。
テストコースの周回路で行う車間距離計測や白線逸脱計測、軌跡計測に最適。
<デメリット>
ランニングコストが掛かる。
|

 |
VBOX4 ADAS 100Hz データロガー
[ 参考価格(税抜) 5,600,000円 ]
*別途、補正電波を受けるための機材が必要です
VBOX4 ADAS は、RTK測位により位置精度2cm CEPの精度を提供することのできるVBOXです。 高感度RTK-GPSが搭載されているため、従来のRTKに比べて、非常に早い待ち時間でRTK測位を実現することができ、作業効率を大幅に改善できます。
RTK測位完了(RTK Fixed)までの時間は、およそ5秒程度です。[当社テスト結果]
VBOX4 ADASは、デュアルアンテナモデルとなり、速度や位置・距離測定だけではなく、正確な車両方向を計測できるため、交差点でのITS試験やパーキングシステムの評価などの高い位置精度を求める試験も行うことが可能です。
VBOX4 ADASは、車間距離計測や白線逸脱計測等の予防安全機能(ADAS)のモードが利用できるように解放されたモデルです。 VBOX4 Dynamicsは、これらの機能が解放されていません。


特徴
100Hz 高感度RTK GNSS エンジン(GPS /GLONASS /BeiDou /Galilleo) 高感度RTKにより、測位までの時間がわずか8秒程度 RTKによる位置精度 2cm デュアルアンテナによる車両方位の測定が可能 スリップ角・ピッチ角の測定が可能 IMU 補正機能 (オプションのIMU05 または IMU05-Sが必要です) SDカードへの記録 USB インターフェース 4 x 24bit アナログ入力(±50V) 2 x CAN-FD インターフェース 1 x CAN出力インターフェース Bluethooth & WiFiインターフェース 設定/解析ソフトウェアVBOXTestSuiteが付属 Racelogic社製オプションモジュールと組み合わせ可能 ブレーキ停止距離精度 ±1.8cm 旧式のVBOX3iSLR-V5、VBOX3iADASとの互換性あり
測定パラメーター と 精度
速度 0.1km/h 時間 0.01s 緯度・経度 0.01 m CEP (RTK使用時) 高度 0.02 m CEP (RTK使用時) 垂直速度 0.2km/h 方位 0.1° 衛星数 スリップ角 0.05° (アンテナ距離 2m の場合) ピッチ角 0.04° (アンテナ距離 2m の場合) 前後加速度 0.5% 横加速度 0.5% 移動距離 <0.05% 4 x アナログ入力 2 x CAN-FD 入力 1 x デジタルトリガー入力 10ns
VBOX4 ADAS セット内容
VBOX4 ADAS 本体 (VB4ADAS) 100V AC 電源ケーブル (RLVBACS020) 7 ‾ 30V DCシガーライター電源ケーブル (RLCAB010L) GNSSアンテナx2(RLACS356) アンテナケーブル 4mx3 (RLCAB080-4) 32GB SDカード) SDカードリーダー 15ピンDコネクタ 加工用 (SUBCON15M-SH) 運搬ケース (RLACS351) USBタイプBケーブル 2m (RLCAB042) テープメジャー UKASまたはISO17025校正証明書 ソフトウェア各種

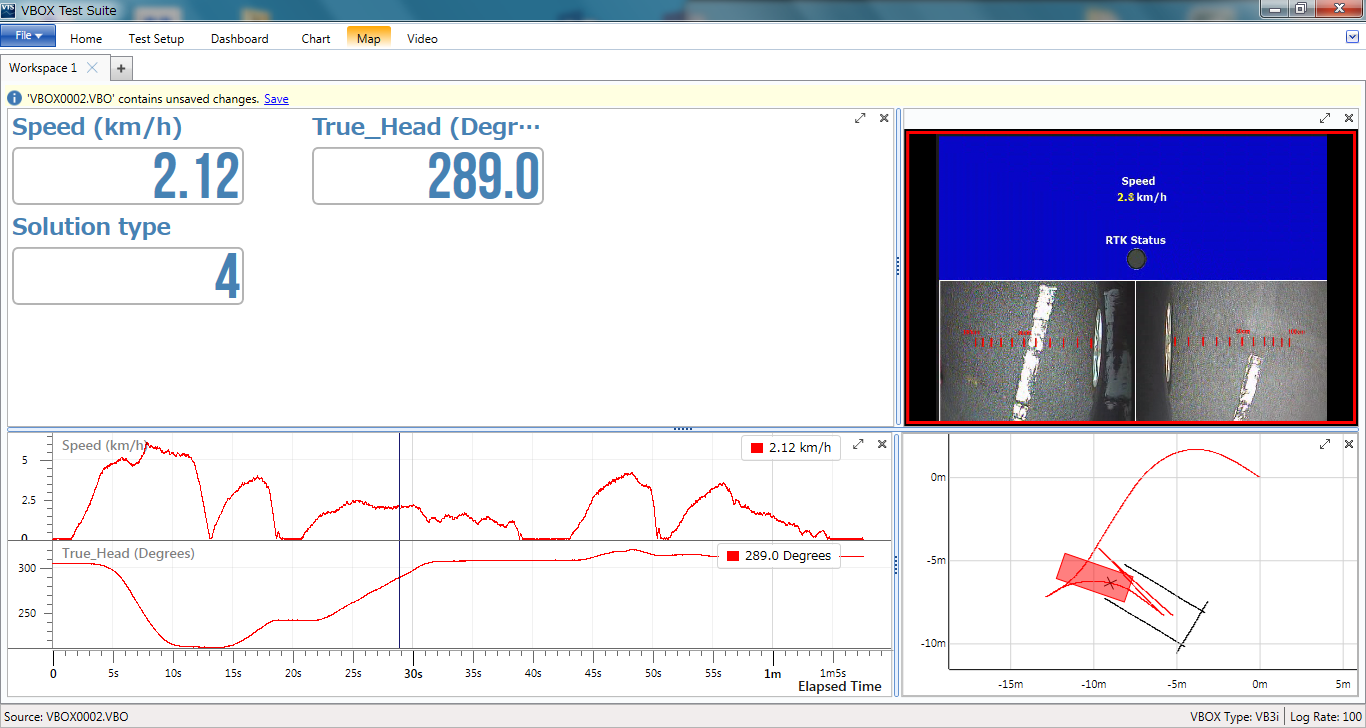
サンプルデータ
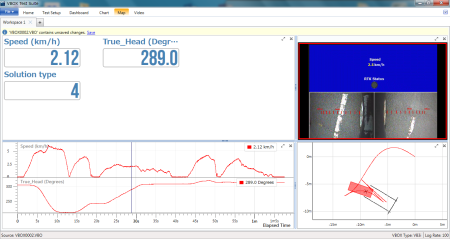
VBOX4 ADASモデルで、自動駐車の評価を行ったデータ。
左下のデータは上から順に、速度・車両方位(デュアルアンテナから)のデータ。
画面右下は、走行軌跡に車両の輪郭、駐車枠を重ね合わせたものです。
Video VBOX Proを同時に使用すると、画像も同期できます。(右上)
高感度RTK
VBOX4 ADAS及びVBOX Touch RTKは、高感度RTK-GPS受信機が搭載されています。次の映像は、実際にRTK測位が完了するまでの時間を計測したものです。
RTK FixedがRTK測位(位置精度2cm)が完了したステータスです。金属の蓋を被せて、わざとGPS信号を遮り、RTK Fixedになるまでの時間を評価しています。
<オープンスカイ>
<少しビルのある市街地>
注:ビルに囲まれた環境では、素早くRTK Fixedにすることは難しいです。
[IMU セット価格]
VBOX4 ADAS + IMU05 [ 参考価格(税抜) 6,540,000円 ]
VBOX4 ADAS + IMU05-S [ 参考価格(税抜) 7,580,000円 ]
[ファームウェア]
VBOX3iADAS_V3.00b34305 旧モデル
VBOX4 ADAS_V1.00b00608
[VBOX4シリーズ カタログ_日本語]
[VBOX4シリーズ_カタログ詳細_日本語]
[VBOX4 WEBマニュアル_ブラウザで翻訳してください]
本製品はデモ機のご用意があります。
|
 |
VBOX Touch RTK 10Hz Data Logger
[ 参考価格(税抜) 1,420,000円 ]
*別途、補正電波を受けるための機材が必要です
VBOX Touch は高感度RTK測位(位置精度2cm)能力を持つGNSS受信機が搭載されたデータロガーです。ディスプレイはタッチパネルになっています。
RTKの測位時間はわずか5秒程度で、ビルの間などの従来はRTK測位を行うことが出来なかった場所でのRTK計測が可能になります。
本製品は、市街地評価試験に最適なツールになります。
電子基準点等と一緒に使用することで、最大精度2cmを出すことができます。
外部入力には、ブレーキトリガーに対応しています。
外部出力には、CAN出力が利用可能です。

特徴
- 10Hz RTK GNSSを搭載 (GPS, Glonass, Galileo, BeiDou, 準天頂衛星)
- 高感度 RTK測位
- 4.3インチのカラータッチディスプレイ
- WiFi, Bluetoothを搭載
- ブレーキトリガー入力が可能
- CAN出力が可能
- パイソンスクリプトによるアプリケーションソフトウェアの切り替えが可能
- SD カードによる記録
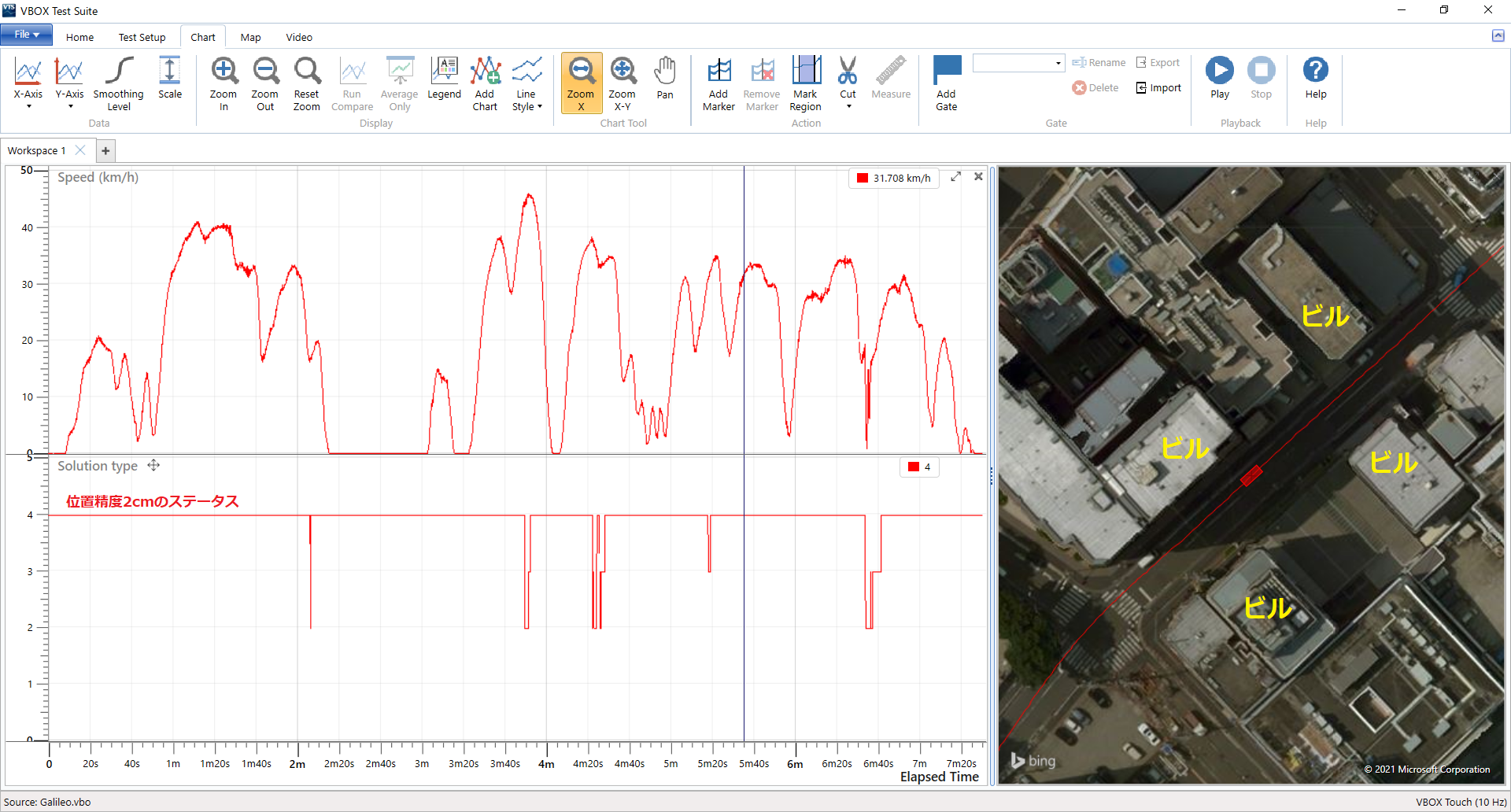
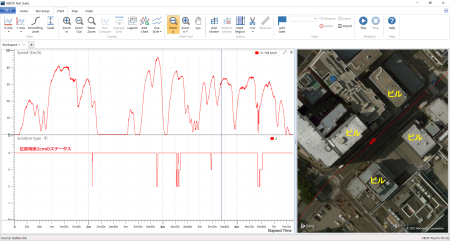
<RTK測位能力>
VBOX Touch RTK と仮想基準点機材を搭載して、市街地を走行した例です。左右がビルに挟まれた環境でも、RTK測位が外れることがなく、驚異的なRTK測位能力を示すデータです。
注意: 本システムでRTK測位を行うためには、Base Station 6 もしくは 電子基準点(RTCM_V3.2) が必要です。
サンプルデータ(.vbo)はこちらからダウンロード可能です。
測定パラメーター と 精度
- 速度 ±0.1km/h
- 時間 0.1s
- 緯度・経度 ±2cm CEP (95%)
- 高度 ±4cm CEP (98%)
- 方位 ±0.3°
- 衛星数
- 前後加速度 ±1%
- 横加速度 ±1%
- 移動距離 <0.05%
- ブレーキトリガー 停止距離精度±5cm
- CAN入力
セットに含まれるもの
- VBOX Touch RTK 10Hz 本体
- 12V DC シガー電源ケーブル
- GNSS アンテナ
- SD カード
- サクションマウント
- プラスチック運搬ケース
- ソフトウェア各種

[VBOX Touch RTK カタログ_日本語]
[VBOXTouch オンラインマニュアル_英語]
本製品はデモ機のご用意があります。
|


|
固定基地局 【RLVBBS6】
[ 参考価格(税抜) 3,330,000円 ]
固定基地局(ベースステーション) は、GPS の位置精度を向上させるための補正データを生成して配信するシステムです。
対応する衛星:GPSL1/L2/L1C/L2C, GLONASS L1/L2, Galileo E1/E5a/E5b, BeiDou B1/B2
対応する補正情報:RTCMv2, RTCMv3, CMR, RTCM v3.2 MSM4, MSM7
生成された補正データは、2.4GHz無線機によってVBOX3i SL RTKへ送信されます。 システムは、バッテリー内蔵の本体(黒ボックスの機器)
とGPS アンテナ、5.5mポールで構成されています。
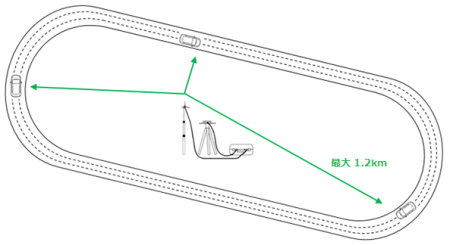
固定基地局は、試験エリア付近に設置して使用します。
接続した無線機(日本向け製品)の飛距離は1.2km程度となるため、その範囲内にVBOX4 ADASを搭載した車両がいる必要があります。
使用中は、固定基地局のGPSアンテナの位置を動かすことはできません。
電源は内蔵LiMhバッテリーもしくは12V DC を利用できます。
[Differential Base Station カタログ_英文]
[Differential Base Station マニュアル_英文]
本製品はデモ機のご用意があります。
|

|
無線機
[ 参考価格(税抜) 360,000円/台 ]
無線機はRTK 測位において、補正データを固定基地局からVBOX4 ADAS へ送信するために使用します。
2.4GHz帯 - 特定小電力無線のライセンスを取得しているため、申請不要で利用できます。
固定基地局用の無線機の飛距離は1.2km程度です。
本製品はデモ機のご用意があります。
|
市街地でのRTK測位 :位置精度2cm (電子基準点方式)
固定基地局を使用せず、携帯電話通信を利用して補正信号を取得し、市街地などのより広域で2cm 精度を達成する方式です。
電子基準点方式では、VBOX4 ADAS にRacelogic NTRIPモデムを接続して、補正情報を受信します。
市街地での試験に最適なアプリケーションです。
注) 電子基準点もしくは固定基地局を利用したRTK測位は、周りの環境に影響を受ける測位方式です。
補正電波が届いても、近くにビルが建っていたりする場合は、2cmの精度が達成できず、40cmや3m精度に劣化します。
IMU補正や車輪速補正をを利用すると、一時的に衛星が遮断されても精度を維持することが可能です。
注) 電子基準点によるRTK測位を利用する場合は、月々のサービス利用料が発生します。
電子基準点によるRTK測位システムは、最低限として次の機器が必要です。
- VBOX4 ADAS 100Hzデータロガー もしくは VBOX4 Dynamics100Hzデータロガー
- Racelogic NTRIPモデム
電子基準点方式のメリット/デメリットには、以下の特徴があります。
<メリット>
高速道路等の開けたエリアであれば、市街地でテストが可能。
絶対緯度経度の情報が取得できる。
テストコースの周回路で行う車間距離計測や白線逸脱計測、軌跡計測に最適。
<デメリット>
ランニングコストが掛かる。
下の配線図は、オプション等を追加した場合の一例です。

|

|
NTRIP モデム
[ 参考価格(税抜) 260,000円/台 ]
NTRIP モデム(RLVBNTRIPMDM)は、NTRIP(インターネット プロトコルを介した RTCM のネットワーク通信)を介して、電子基準点の位置補正データを配信するデバイスです。
NTRIP モデムは、MEEQ の SIM カードを利用することが可能です。
また、コンピューターまたは携帯電話の Wi-Fi 通信に接続して、イ ンターネット経由でローカルの NTRIP プロバイダーから位置補正 データを受信することもできます。
本製品はデモ機のご用意があります。
[NTRIPモデム カタログ_日本語]
[VBOX3i SL RTK 設定手順書_電子基準点方式_日本語]
|
|

VBOXオンラインマニュアルはこちら |